- ITソリューショントップ
-
製品・ソリューション
-
ダイキンのIT
 製造業向けITソリューション
製造業向けITソリューション 品質DX支援 QX digital solution
品質DX支援 QX digital solution 建設業務改善ソリューション
建設業務改善ソリューション ビル管理業務支援 DK-CONNECT BM
ビル管理業務支援 DK-CONNECT BM FILDER SiX TOP
FILDER SiX TOP FILDER SiX 電気 TOP
FILDER SiX 電気 TOP Rebro D TOP
Rebro D TOP 実験記録をデータベース化 ParsleyLab
実験記録をデータベース化 ParsleyLab マテリアルサイエンス向けソフト Materials Studio
マテリアルサイエンス向けソフト Materials Studio 熱力学物性予測ソフトウェア COSMO
熱力学物性予測ソフトウェア COSMO 電子実験ノート
電子実験ノート 総合3DCG 制作ソフトウェア Maya
総合3DCG 制作ソフトウェア Maya 総合3DCG 制作ソフトウェア 3ds Max
総合3DCG 制作ソフトウェア 3ds Max 3Dキャラクタアニメーション制作ソフトウェア MotionBuilder
3Dキャラクタアニメーション制作ソフトウェア MotionBuilder モーションキャプチャーシステム Xsens MVN
モーションキャプチャーシステム Xsens MVN モーションキャプチャーシステム 

ソフトウェア
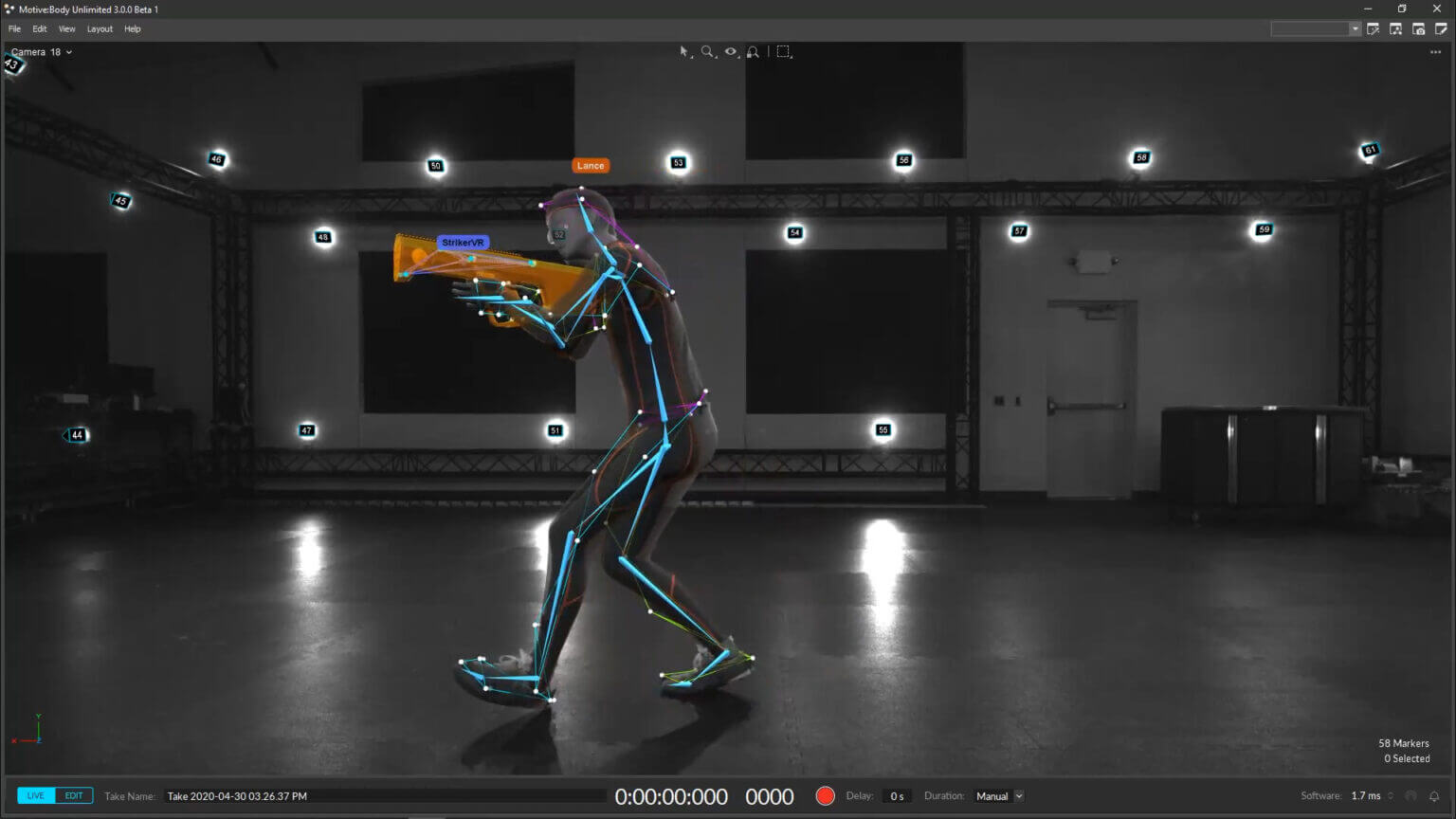
Unbreakable
壊れないスケルトン
新しいスケルトンソルバ”Quantum Solver”は、スケルトントラッキングの精度を大幅に向上させ、『壊れないスケルトン』を実現しました。
アクターの骨格の動きを正確に定義することで、マーカーが隠れるような厳しい条件でも壊れずにトラッキングし続けることができます。
※”Quantum Solver”とはMotive:Body 3.X用に開発された新しいソルバです。”ソルバ”とは、実際に計測されたマーカーからスケルトンやボーンの位置・姿勢(6 DoF)を推定するプログラムプロセスのことを指します。
High precision
高精度、低遅延
Motiveは0.2㎜以下の高精度で3次元位置姿勢のトラッキングをすることができます。また1つのシステムで同時に多人数・他剛体でもリアルタイムに遅延なくキャプチャーすることができます。
位置精度
+/-0.2mm
レイテンシー
4.2ms以下
回転精度
+/-0.5度
※ほとんどのOptiTrackカメラ構成では、広いトラッキングエリアでも+/- 0.2mmの精度が得られます。要望する精度が実現するための機器構成についてはご相談ください。
※ほとんどのOptiTrackシステムは、3つ以上のパッシブマーカーまたはアクティブマーカーからグローバルオリエンテーション(回転)を導き出します。よって回転精度はこれらのマーカー間の距離によって変化する可能性があります。
Easy setup
簡単にできるセットアップ
スケルトンや剛体の作成はワンクリックで行うことができます。キャリブレーションは数十秒~数分で完了し、自動マスキング機能等もついているため、準備からキャプチャーまで簡単かつスピーディに行うことができます。
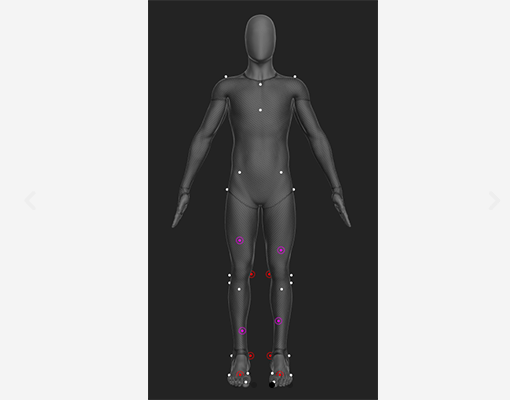
Trained Markersets
あらゆる形状をトラッキング
布、紐、動物、表情、指など、マーカーさえ取り付けられれば、ほとんどの形状をマーカーセットを形成してトラッキングが可能です。
人か剛体しかキャプチャーできないといった従来の制約はありません。
※Motive:Body 3.1以降のバージョンのみ対応
精度を保ち続けるキャリブレーション
Motiveではバックグラウンドで常にキャリブレーションをし続けるContinuous Calibrationを採用しているため、最新で最高の精度を保ったまま1日キャプチャーすることできます。温度変化やカメラのちょっとした揺れなどが原因で精度が落ちる心配がありません。
実証されたマーカーセット
Motive:Bodyは、科学的および臨床的に検証され、また論文審査のある専門誌で何度も使用されている多くのマーカーセットのライブラリを提供します。
- Helen Hayes Markerset
- Conventional Gait Model
- Rizzoli Clinical Gait Model
- Rizzoli Multi-Segment Foot Model
フル解像度のリファレンスビデオ
すべてのOptiTrackカメラは、キャリブレーション&同期されたグレースケールのリファレンスビデオカメラとして使用できます。マーカー、剛体、スケルトンなどをリファレンスビデオに重ね合わせて確認できるため、後編集やデータ解析に役立てることができます。PrimeColorを使用することでカラー映像にすることも可能です。
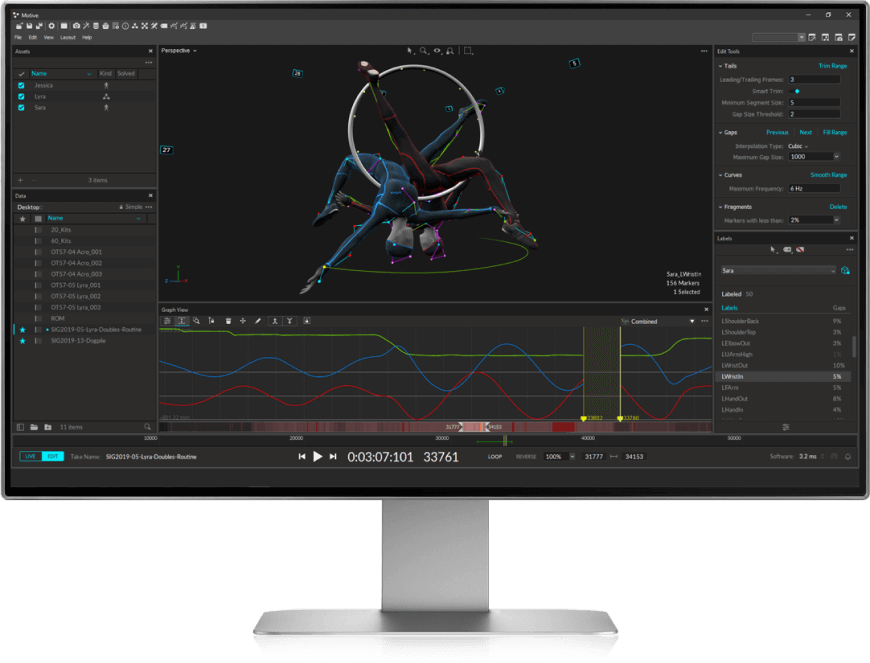
充実した編集ツール
Quantum Solverにより、マーカー修正の時間が圧倒的に短縮されました。また、PythonやC#のテンプレートが付属しているので、後処理が必要な場合はそちらで対応も可能です。従来通り、ギャップ補間、スワップ補正などのマーカー修正を行うこともできます。
| ストリーミングプロトコル | NatNet (UDP with Multicast/Unicast options) VRPN TrackD |
|---|---|
| データ受信可能ソフトウェア | STT InSight TheMotionMonitor Visual3D MATLAB LabView |
| プラグイン | Unreal Engine Unity MotionBuilder OpenVR (HMD Tracking) Maya (VCS only) |
幅広いストリーミングオプション
Motiveはあらゆる研究開発用ソフトウェアや3Dレンダリングソフト等にストリーミングすることができます。また無料のNatNet SDKやカメラSDKを使って独自のインターフェースを作成することも可能です。

OptiTrackのプラグイン
CGアニメーション、Vtuber、VRコンテンツなど様々なシーンでOptiTrackモーションキャプチャーシステムを活用するため、各種プラグイン(無償)が用意されています。

OptiTrackの開発ツール
Motiveソフトウェアで3次元計測したトラッキングデータにネットワーク経由でアクセスするNatNet SDKと、カメラの制御・2DオブジェクトのトラッキングなどMotiveソフトウェアを使用せずに開発するためのパッケージ、Camera SDKが用意されています。
グローブで繊細な指の動きをキャプチャー
スパイスが現在取り扱っているManus社およびStrechSense社のグローブは、Motive3.X内※で全身のスケルトンデータとフィンガーデータを統合させて表示・出力することができます。手の甲の丸みや指の開閉など、光学式では表現できないような繊細な指の動きをデータ化することが可能です。

外部同期の入出力、ゲンロック、タイムコード
eSync2を使用すればPrime/PrimeXシリーズカメラを任意の信号またはソースに同期させることができます。また録画やその他のイベントトリガーを、汎用入力とソフトウェアコマンドから管理できます。
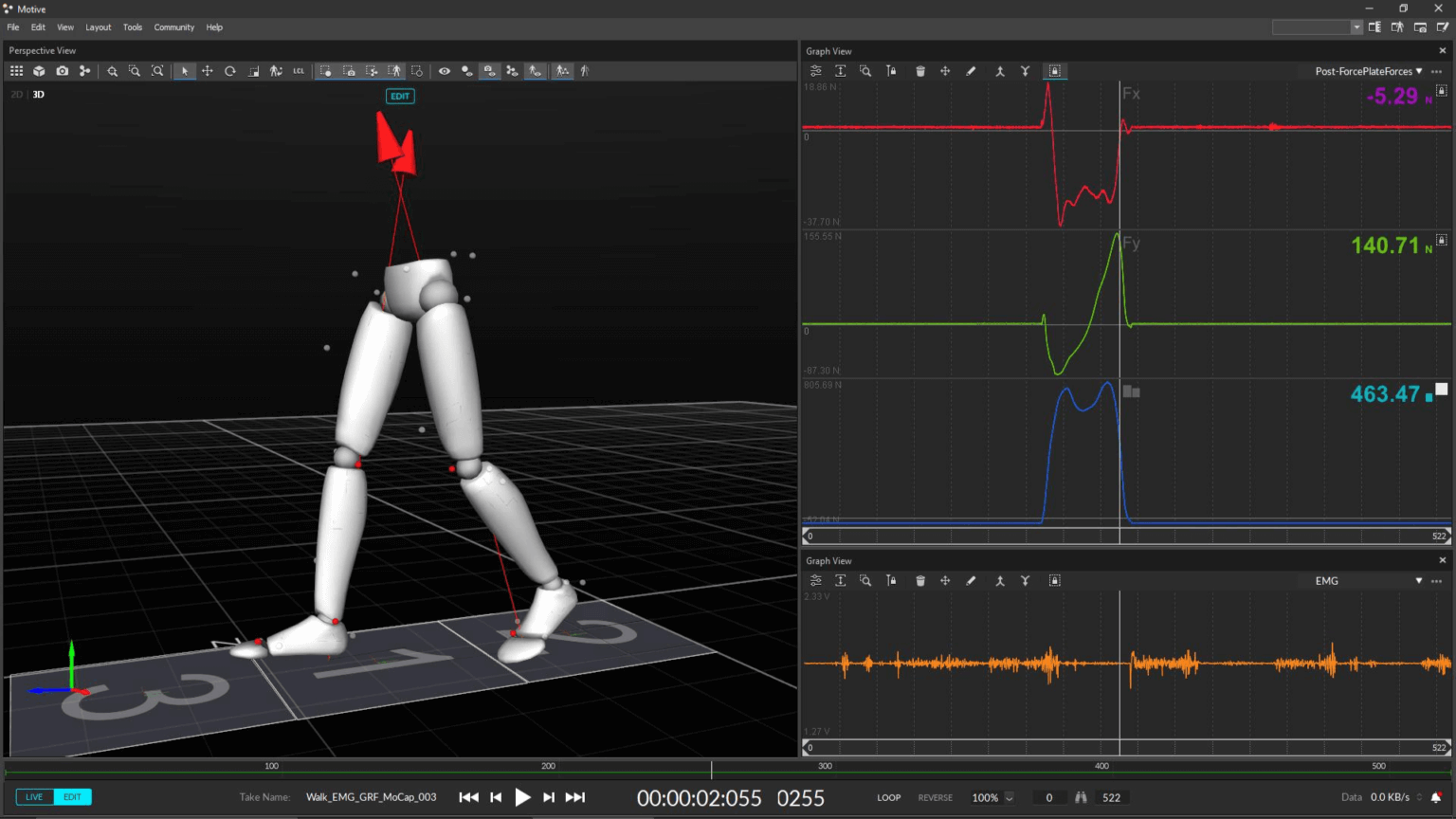
フォースプレートや筋電系をサポート
AMTI/Bertec/Kistlerのデジタルフォースプレート、Delsysの筋電計、およびアナログデバイス(NI-DAQを介して)のプラグアンドプレイをネイティブサポートします。
解析ソフトと連携
Venus3D R
「VENUS3D R」は、バイオメカニクス分野や工業分野での変位計測を、どなたでも容易に行なえる、新しい3次元解析ソフトウェアです。 角速度や加速度など20種類以上の計算・表示機能が備わっているので、エクセルで苦労して式を入れる必要はありません。
AnyBody
「AnyBody」はヒト筋骨格モデルに動作を与えた際、人体各部に作用する力(筋活動量、筋力・拮抗筋力、腱の弾性エネルギ、関節力・関節モーメントなど)を逆動力学解析で算出します。 動作は関節角度入力とモーションキャプチャ計測データに対応し、出力データが自在にカスタマイズできる自由度の高い解析ソフトウェアです。
※1.ほとんどのOptiTrackカメラ構成では、広いトラッキングエリアでも+/- 0.2mmの精度が得られます。要望する精度が実現するための機器構成についてはご相談ください。
※2.ほとんどのオプティトラックシステムは、3つ以上のパッシブマーカーまたはアクティブマーカーからグローバルオリエンテーション(回転)を導き出します。よって回転精度はこれらのマーカー間の距離によって変化する可能性があります。